TOP >
姫路ソフトワークスのHSWB02RGとGWSのS03Tを使ってロボット開発をしています。 ROBO-ONE本選への参加が夢?です。
2004-12-28
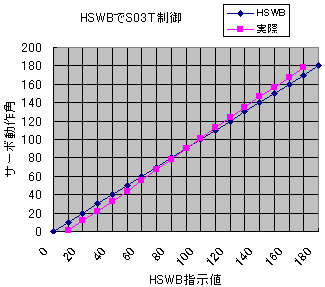
HSWB02RGでS03Tを制御した場合、原点を90度として指示値よりも1割程度多めにサーボが動作するようです。動作角は180度きっちり動きました。サーボ角度を計算する場合は補正は必須のようです。