ワーク取出しロボ
従来ワークを手で金型に入れては手で取出す、の繰返しで加工していたのが、入れるだけの加工へと簡単安全になる
プレス前面からワークを入れ後方に取り出せば工程ジャンプ等のミスが無くなる。
大量に加工する場合は各種の方法があるが、単発の曲げ加工などでエアーで飛ばせない様な部品を取り出すのには非常に有利。
軽量でプレスのボルスタ上に取付可能。(電気関係の追加工事は必要) 取り付けたままで
手加工と併用したり一台を複数のプレスに使用できる
プッシャーフィーダと組み合わせると確実に排出確認できる様になるため連続運転が容易に
なる。(電気関係の追加工事は必要)
プレス機械へのセットは、慣れれば10分くらいで可能。
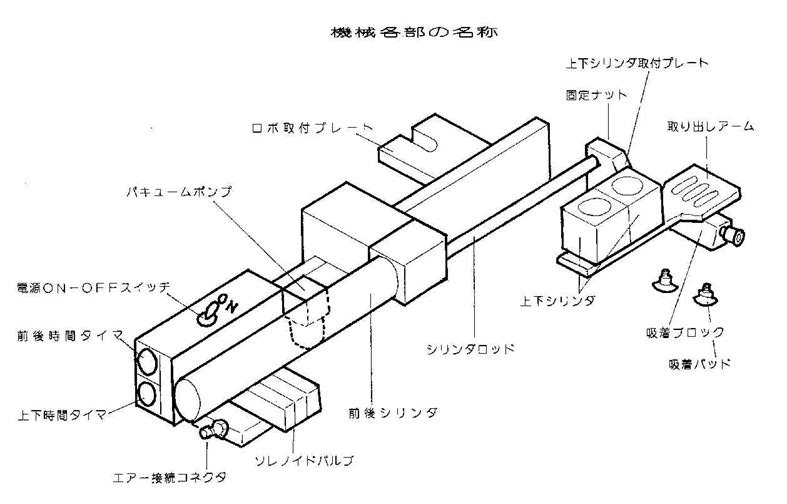
概略構造
| ワーク寸法 |
100×100迄 |
ストローク |
80mm以上 |
| 吸着方法 | バキューム式 | 制御方式 | AC100V単相 |
| 搬入ストローク | 100、150mm | 駆動方式 | 空気圧5kg |
| 上下ストローク | 15mm | ロボ寸法 | 110×200×450 |
| 適合プレス機械 | 20t〜 | ロボ重量 | 9kg |
| 概略価格 | 20万 | 取付け工事費は別途 |
取出しロボの動作 ワーク挿入の反対側で動作